Tarea
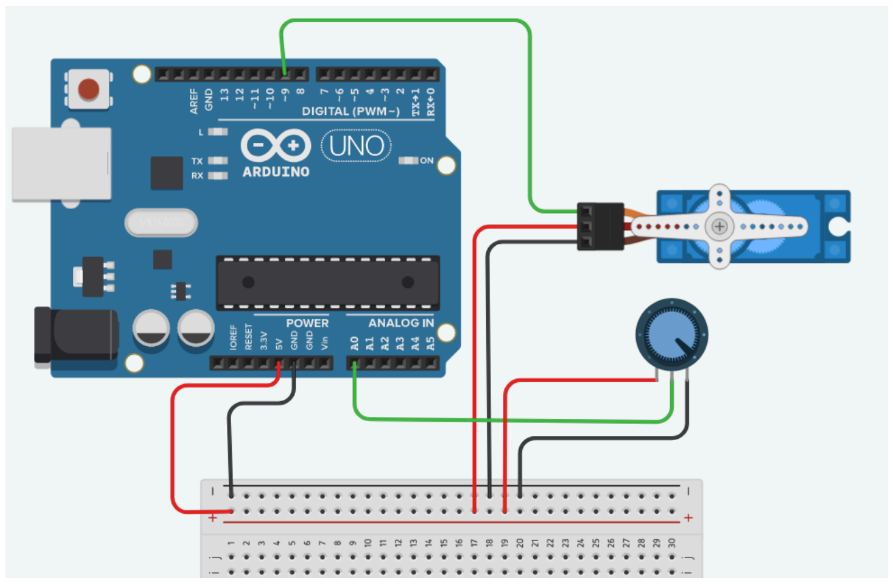
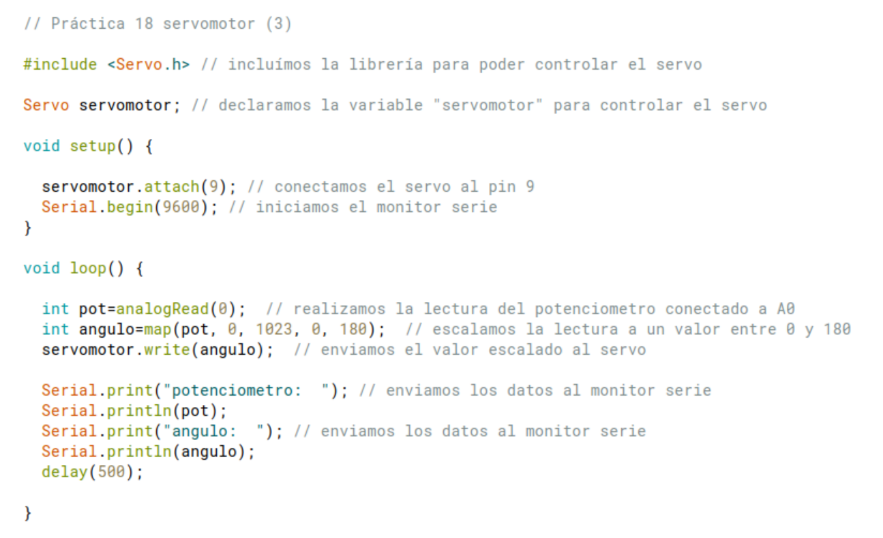
En esta práctica controlaremos la posición del servo por medio de un potenciómetro, donde el servo se posicionará en función de la posición del potenciómetro.
Para ello vamos a utilizar la función map () de Arduino que mapea un número de un rango a otro, pasamos el valor leído en el potenciómetro a grados en el servo. Los valores los vamos a ver también en el monitor serie.